去年4月份,临近高考的沈烨桦在中国青年报看到了关于浙江机电职业技术学院(浙江机电)洪嘉昱学长研制“打工机器人”的报道后,感叹到:“原来研发机器人也可以离我们这么近”,这给高中时期就在机器人专业学习的沈烨桦内心种下了一颗种子。在高考后她如愿进入了浙江机电,也通过洪嘉昱学长介绍认识并有幸加入了自动化分院黄文广老师的技术攻关小组,从而依托设立于浙江机电的浙江省“中小企业车间智能化改造应用技术协同创新中心”承接企业项目,满足中小企业数智化改造需求。

在小组例行会议上,黄文广老师播放了一段企业现场应用分拣机器人产品的视频,视频中并联机器人带动吸盘型末端执行器高速分拣半导体行业重要的陶瓷基片,观看的同学们都被眼花缭乱的分拣过程震撼到。黄文广老师说:“这款设备是一年前我带领团队为山东工业陶瓷研究设计院有限公司进行半导体分拣产线数字化改造时研发的非标产品,分拣效率已达100片/min,但随着半导体行业发展,特别是在后摩尔时代的背景下,企业产能显著升级,需要进一步提升分拣效率。”在会议中师生共同进行了头脑风暴,为分拣设备升级出谋划策,但本次会议并未形成可行方案。
会后沈烨桦开始了思考,视频中机器人末端的吸盘承担了高速吸附、释放的任务,直觉告诉自己要想提升分拣效率,一定要在吸盘本体上做文章。沈烨桦找到团队另一位“海归”指导老师罗辰,共同进行国内外行业现有末端执行器产品的深度调研,梳理出了现有吸盘类执行器的共性问题,发现限制吸盘应用速度的主要因素是真空的形成和破除需要时间,即机理机制方面遭遇了瓶颈,吸盘的新方案设计陷入僵局。

百思不得其解之下,在周末回家时一个偶然的机会,沈烨桦遇见了姐姐新带回家的宠物“小金”,它是一只大壁虎,色彩斑斓的皮肤,萌萌哒略带佛系的眼神,静如处子、动如脱兔的生活态度,让小沈同学入了迷,脑边响起了壁虎漫步的旋律。在见识到“小金”飞檐走壁的绝活后小沈同学拍案称奇,脑洞大开,那么小的脚掌能在垂直的墙面支撑整个身体的重量,速度飞快,“小金”的脚掌一定有什么奥秘。第二天小沈同学和罗老师说了这个想法,罗老师立马提出了一个名词:仿生学。时不我待,在师生共同挑灯夜战几个通宵进行壁虎仿生学调研后,范德华力、伯努利定律、文丘里管等理论名词成为大家在食堂吃饭时津津乐道的话题。在清楚了“小金”脚掌的超强吸附力的原理后,如何进行定量研究和仿真分析成为团队新的难题。

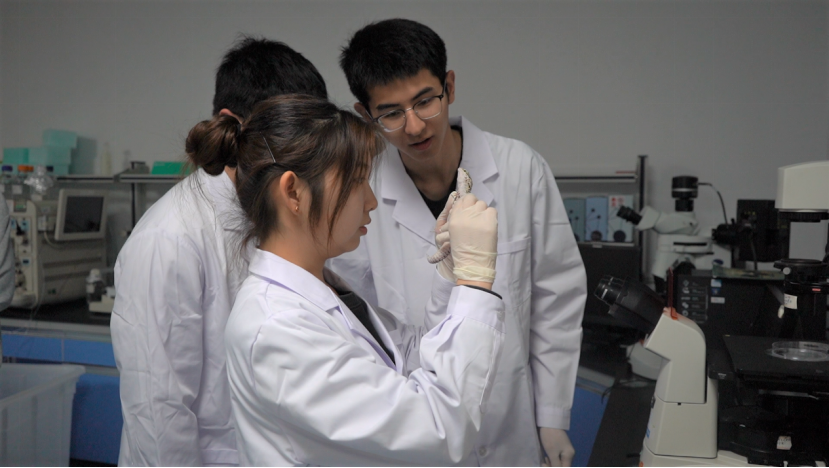
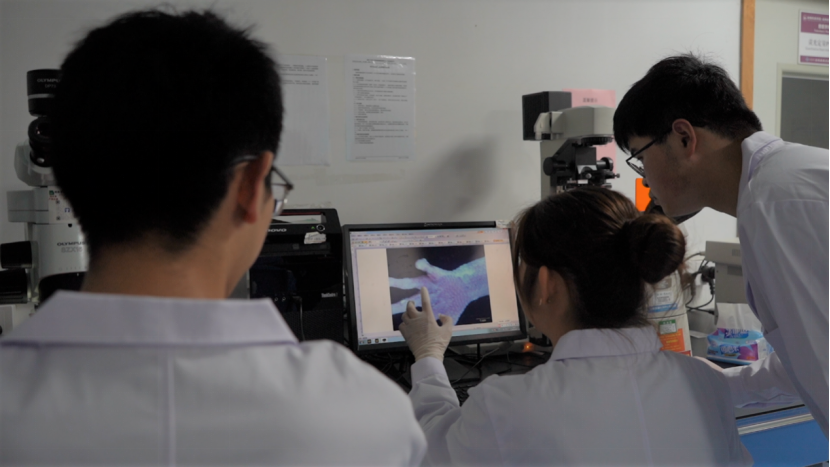
在师生的共同努力下,定量研究任务找到了外援:浙江农林大学动物科技学院。约好时间后,大家带着“小金”一起从城南奔赴临安,在动科院的实验室里对大壁虎的脚掌微观结构进行了显微成像,刚毛结构一目了然,接着进一步获取了吸附力测量的第一手数据,从而为仿生学模型的建立打下了坚实的基础,“小金”也成了动科院实验室的“小红人”,深受大家的喜爱。
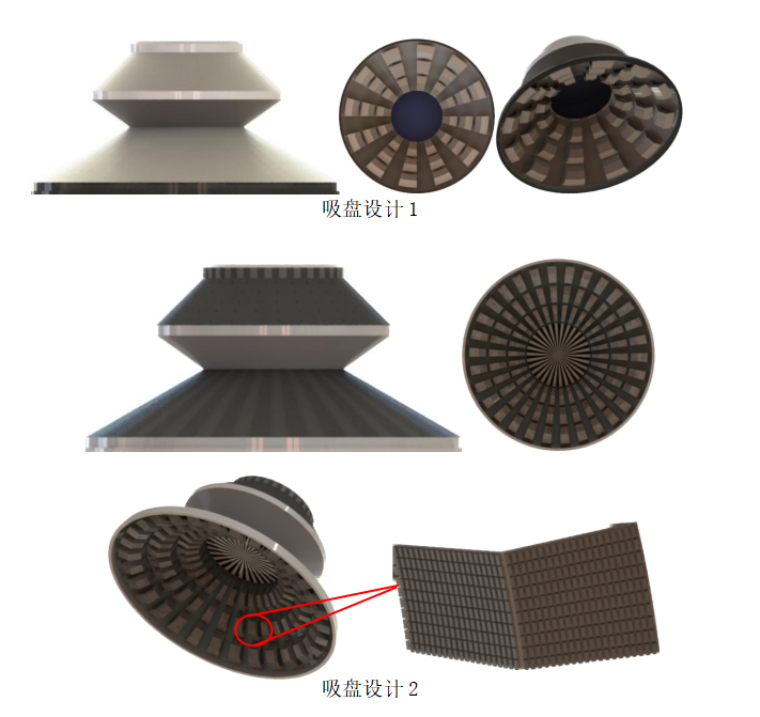
在这些数据基础上,吸盘的优化设计也成为了可能,截至目前,团队已经设计开发了十几种不同的吸盘模型,经过实验筛选,获得了两种性能最优异的明星设计,未来将进一步集成洪嘉昱学长去年研发的柔性六维力传感器以及轻量化气路控制模块,形成智能仿生高速末端执行器解决方案。
目前,该产品已申请发明专利6项,获得实用新型专利授权3项,软件著作权登记2项,未来将在项目进程中不断完善知识产权保护体系。